LABS
Here are the compiled reports of each lab for ECE 4160

Lab 1: Setting Up
Setting up the Artemis Board
Lab 2: Bluetooth
Connecting the Artemis to an off-board computer
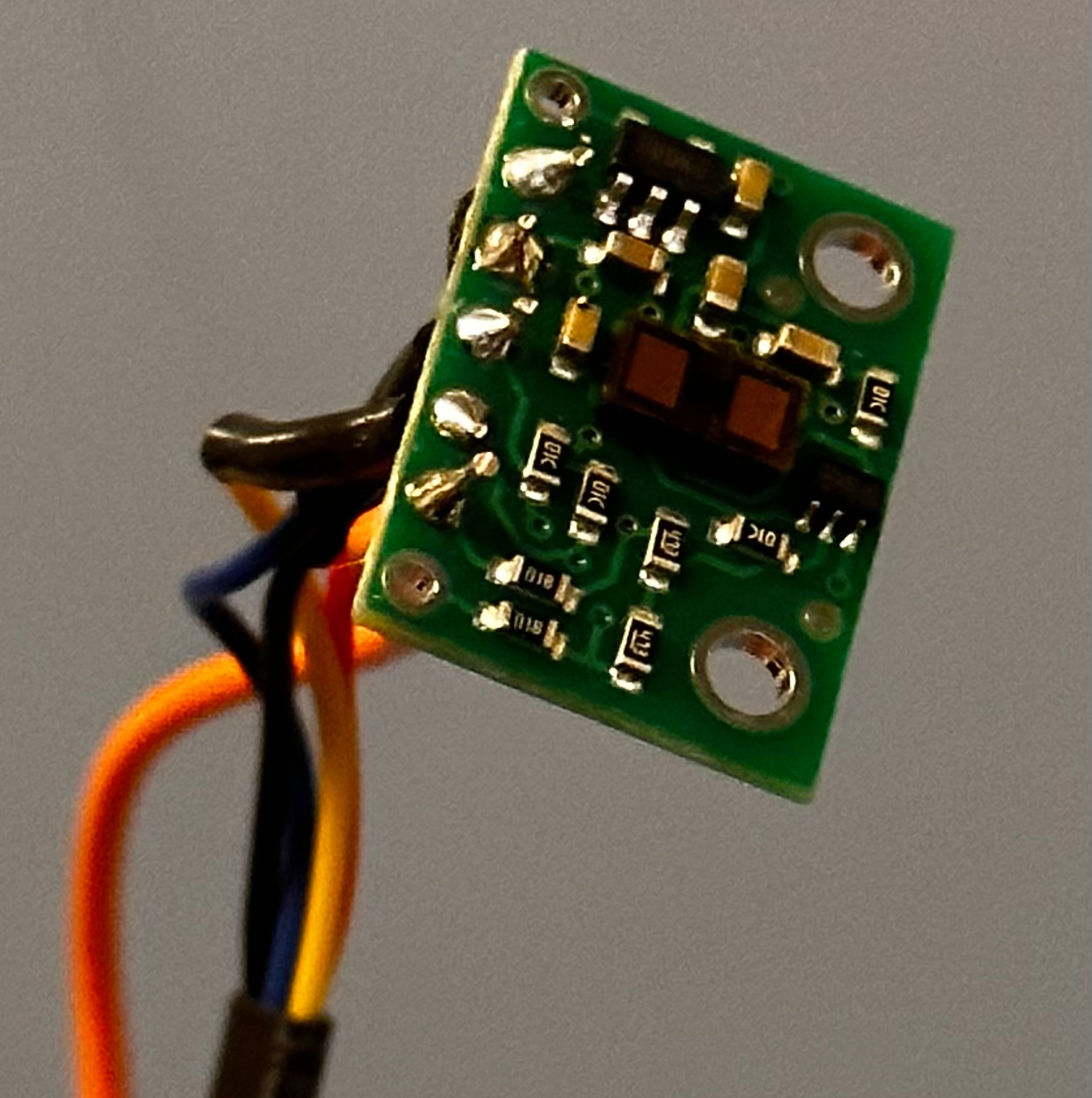
Lab 3: Time of Flight
Implementing and Testing Time of Flight Sensors
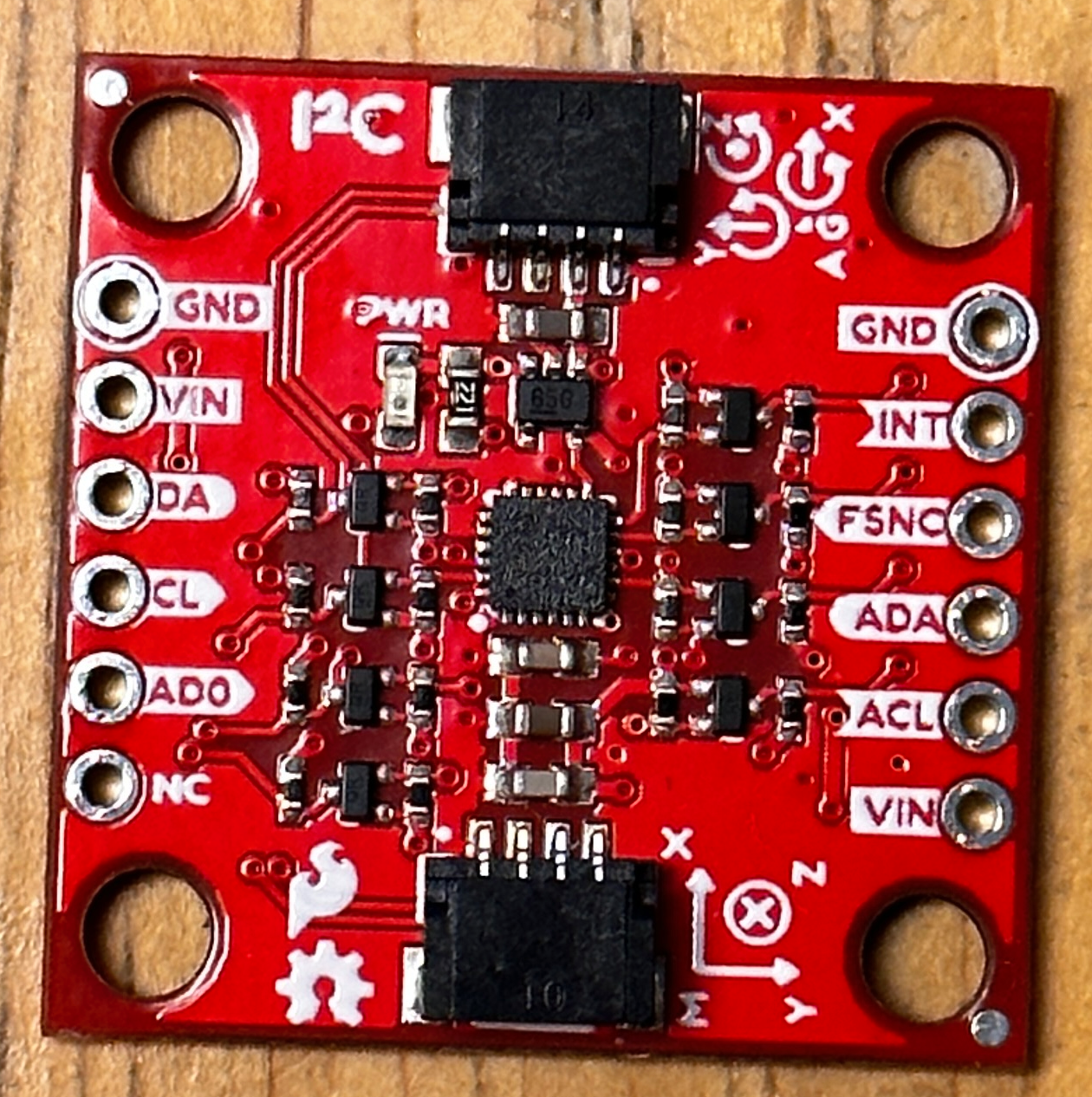
Lab 4: The IMU
Connecting the artemis to reality.

Lab 5: Motor Control
Moving forward among other directions.
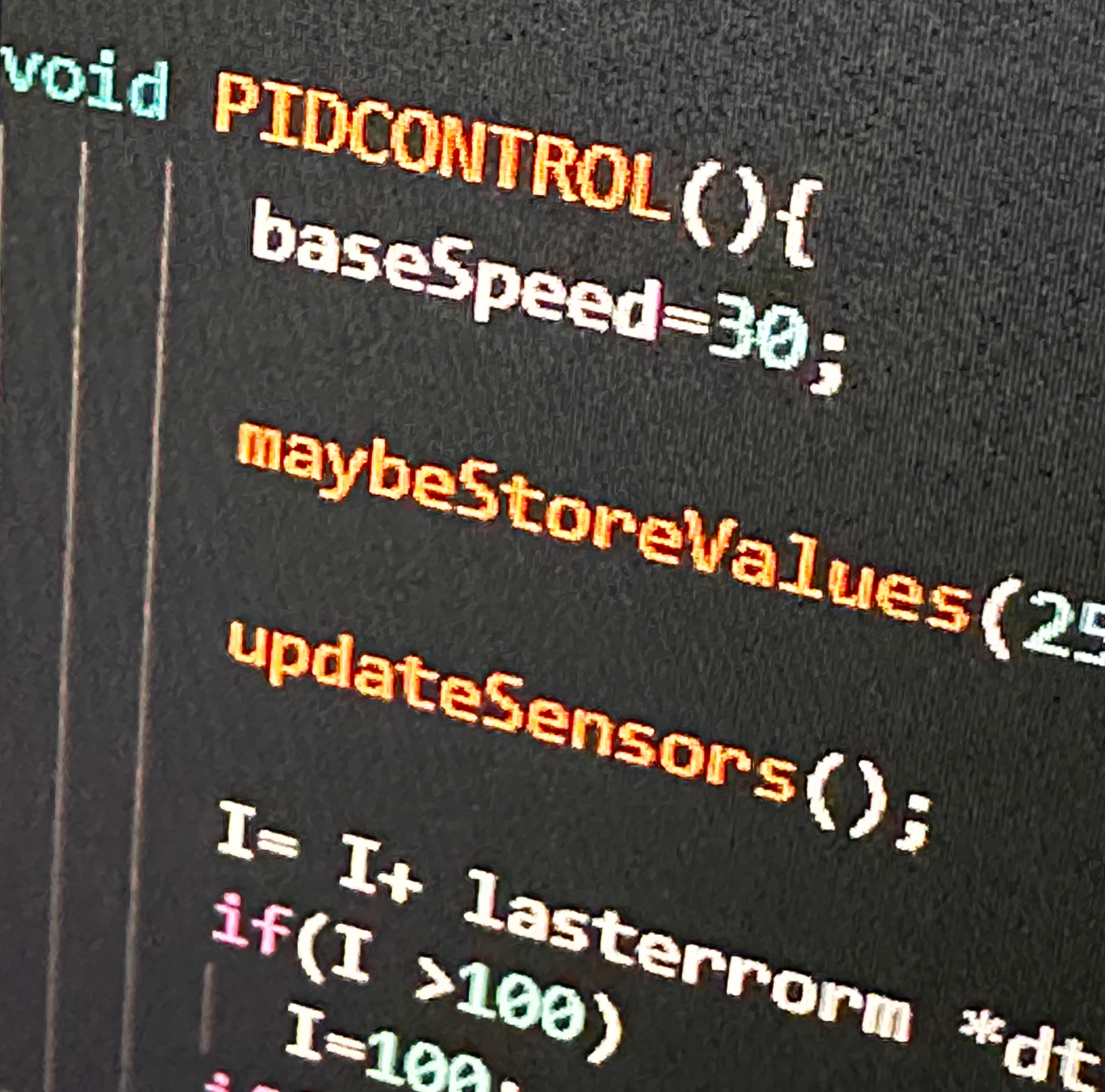
Lab 6: PID Control
Using gain constants to control angle.
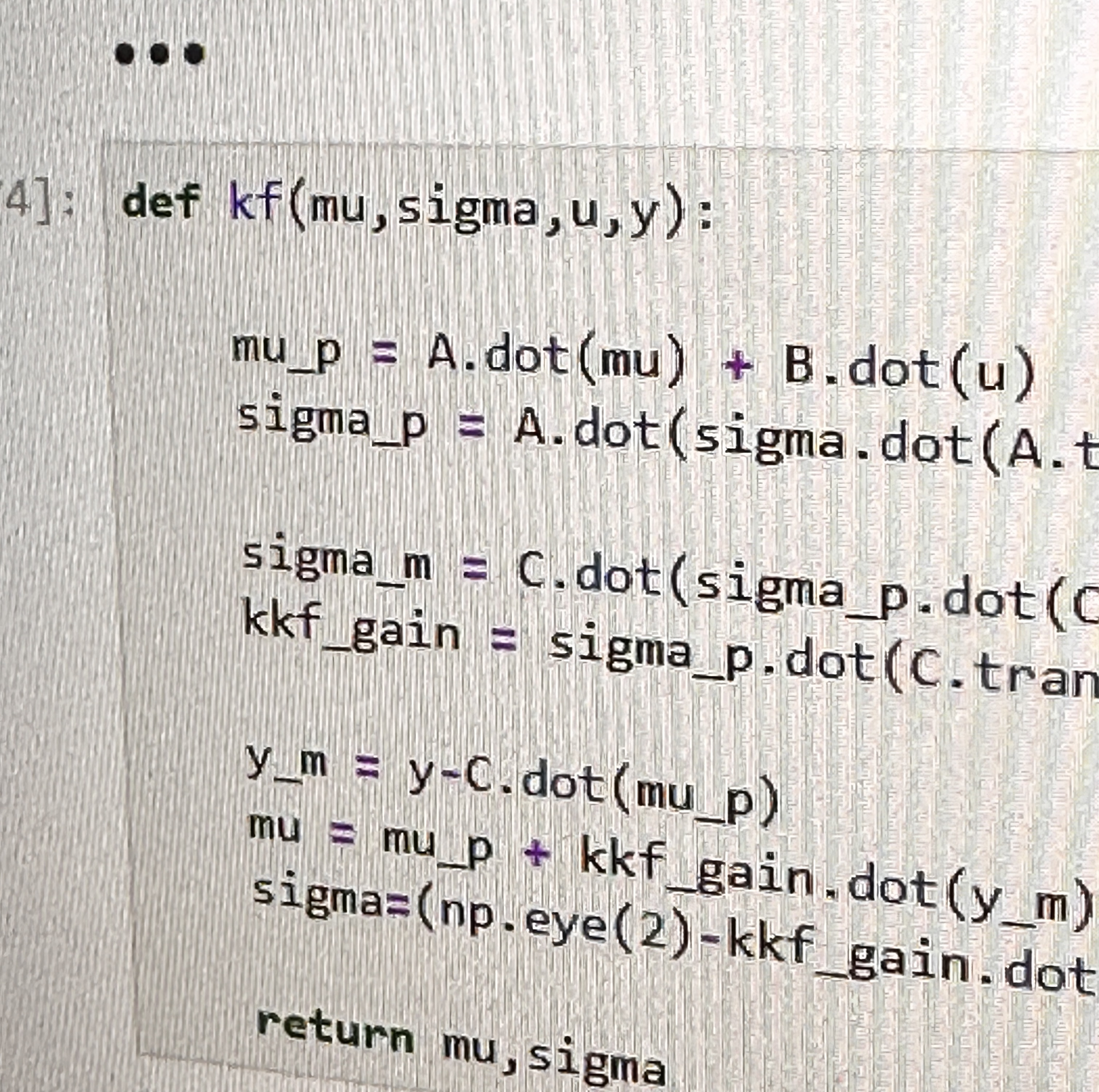
Lab 7: Kalman Filter
Fixing noisy sensors with statistics!

Lab 8: Stunts!
It's a stunt!
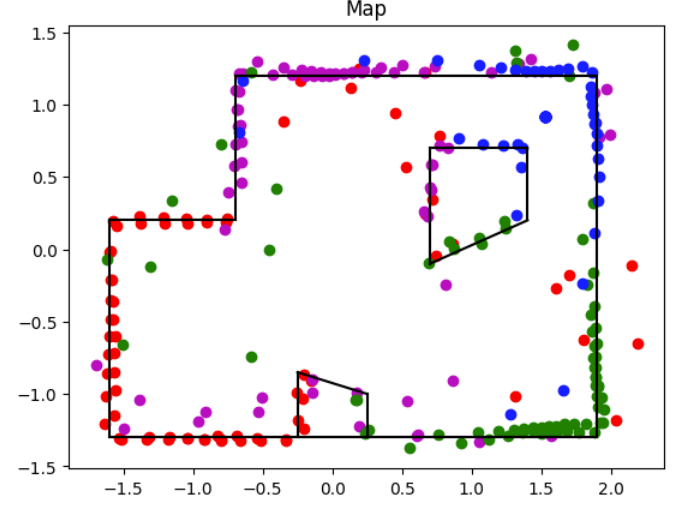
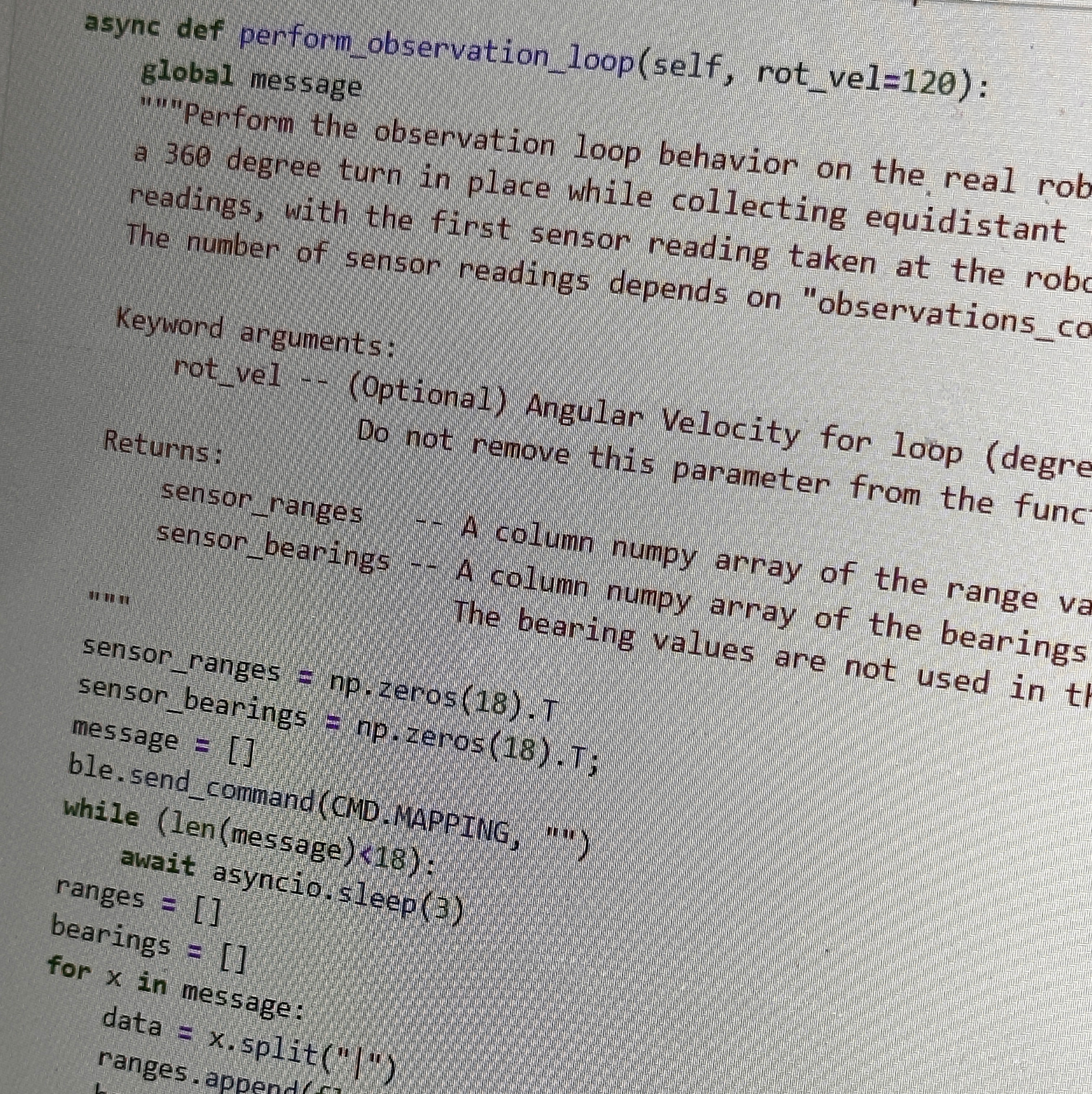
Lab 9: Mapping
Using transformation matrices and TOF data to map a room.

Lab 10: Localization (sim)
Using a Bayesian filter, localize the location of a virtual robot.
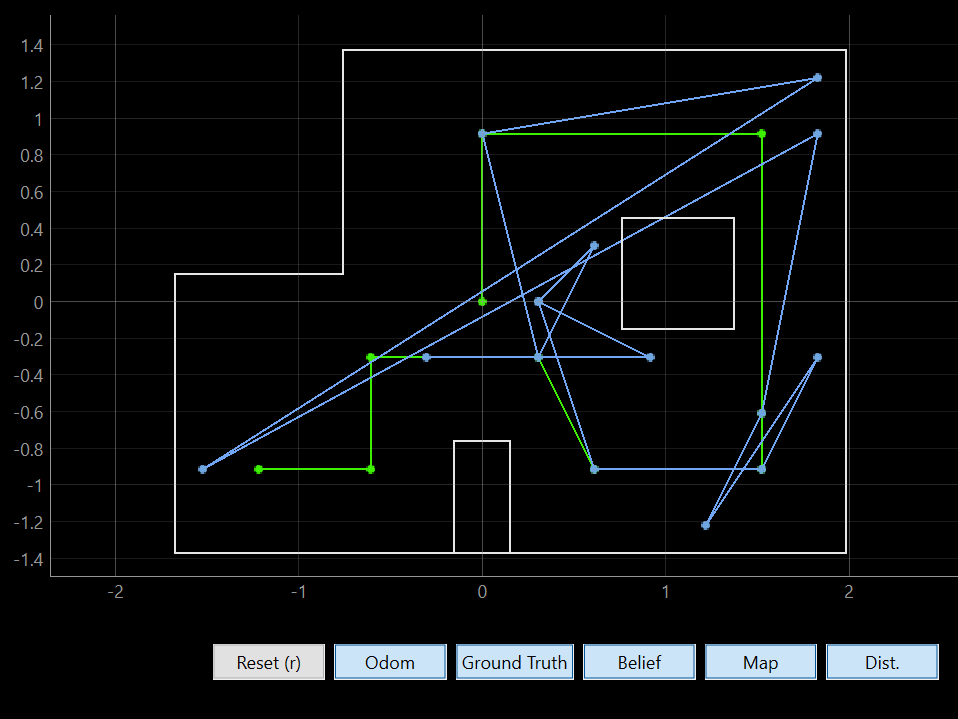
Lab 11: Localization (real)
Using a Bayesian filter, localize the location of a real robot.
Lab 12: Path Planning and Execution
Putting everything together to navigate a map.